Mark Patterson
- Professor, Chief Technology Officer, Global Resilience Institute Core Faculty Member, Coastal Sustainability Institute Affiliated Faculty Member, Institute for Experiential Robotics

I direct the Field Robotics Laboratory (FRL). We design and build free-swimming marine robots, and new kinds of sensors and systems for ecophysiology. I have always loved marine ecology and biomechanics, because they are so interdisciplinary. Inspired by Ken Sebens and the late Steven Vogel and Tom McMahon, I like asking questions that require new technology to find the answer. Serious students of the history of science know that this is usually how science advances: new instruments lead to new insights that often spawn whole disciplines, rather than vice versa.
For the last two decades, our lab has been developing Autonomous Underwater Vehicles (AUVs), free-swimming robots that survey the bottom and water column in ways superior to previous approaches like towed bodies or lowering an instrument over the side of a ship. We use AUVs to make new discoveries such as coherent structures of lowered oxygen over coral reefs, how krill swarms in the Antarctic appear on high frequency side scan sonar, and how to identify fishes from their side scan sonar images using neural network processing. This last area is poised to become a new tool for fisheries stock surveys and one of our vehicles is in use for this purpose by NOAA. Our team is convinced that AUVs are oceanography’s most important recent technological advance.
Our lab holds patents in the area of marine robotics (US 5,995,882) and using machine learning to interpret underwater imagery (US 7,221,621). The original Fetch AUV currently holds the record for the longest continuously operating underwater vehicle. Currently, we are working on 1) designing a deep-sea autonomous vehicle swarm that can persist on-station for months, and return thousands of miles back to shore with physical samples, using a radical new approach to AUV design, 2) exploring how biologically-inspired autonomy (from organisms as diverse as salps, squids, sponges, fishes, and marine mammals and reptiles) can increase the robust intelligence and extended deployment performance of AUVs, 3) integrating new sensors for the detection of microplastics into AUVs in collaboration with Ocean Diagnostics, a blue-tech startup in Canada, and 4) developing methods to thwart the misuse of unmanned underwater systems by terrorists in ports and harbors.
The physical biology of invertebrates (sponges, cnidarians, squid), plants (macroalgae, sunflowers, seagrasses), and fishes is another area that our lab investigates. The allometry of metabolism is an area where we apply chemical engineering theory to aquatic invertebrates and algae. Contrary to the predictions of “universal scaling laws” that have appeared in the literature, these taxa do not follow 3/4 power scaling of metabolic rate with body mass. Instead they exhibit a diversity of scaling exponents for which we have developed a predictive theory based on first principles from fluid transport and mass transfer, as well as the effect of living in groups.
This “flow modulated allometry” model is has been extensively tested in our laboratory, and in the field using saturation diving underwater laboratories. Since 1984, we have used saturation underwater habitats to conduct research in situ on corals and their allies. Using these unique inner space stations, that provide the gift of time to conduct elaborate experiments, we have examined how reef corals respond to water motion during bleaching episodes by altering their photobiology and expression of stress proteins. Our lab has recently developed a predictive electrical network model of the gastrovascular system of corals of the two types of coral bauplan, perforate (where an extensive plumbing connects the polyps) and imperforate (where polyps are not connected directly). This model will help us understand how corals respond to environmental stress including that posed by global warming and ocean acidification. We have also used network science to investigate the resilience and robustness of the coral-symbiont associations on a local, regional, and global scale as a means to understand vulnerability of these paradoxically fragile yet robust ecosystems.
Publications
Awards & Recognition
In The News
-
Research

Professor receives Fulbright to explore one of the world’s most unique hydrothermal vents
Formed by superheated glacial water from the last ice age, the hydrothermal vents Professor Mark Patterson studies have been bubbling beneath the fjord for centuries. -
Research

How living and working under the sea fills aquanauts with wonder and awe. The phenomenon is called the “underview effect.”
Professor Brian Helmuth studies how living underwater can create a mind-blowing effect similar to what astronauts experience in space. -
News

What happens to sea life during hurricanes? Can they move to calmer waters? A marine scientist explains
Some marine animals will escape by going farther out to sea; however, others could perish along the beaches, says Mark Patterson, a professor at Northeastern’s Marine Science Center. -
Research

They’re living boulders on the ocean floor. Northeastern research explains the mysterious corallith
Mark Patterson, a professor at Northeastern University's Marine Science Center, studied hundreds of coralliths off the coast of the Florida Keys. -
Coming soon: A co-op experience living under the ocean
Imagine a co-op experience in which Northeastern University students live for weeks at a time in the world’s largest undersea science station, venturing into the surrounding Caribbean waters on daily scuba dives. -

Experience Magazine: He spent months underwater. Now he wants to save the ocean.
Mark Patterson, marine scientist, aquanaut, and inventor of underwater robots, walked into San Diego Comic-Con dressed as a giant coral polyp. He was decked out entirely in orange, with ten fake tentacles dangling from his neck. Green and purple splotches on his shirt front represented microplastics pollution, lodged in his polyp-gut. This was 2015, and... -

This robot is going to map uncharted kelp forests in the Arctic–and the impact of climate change
Professor of marine and environmental sciences at Northeastern, Mark Patterson, receives the Fulbright U.S. scholar award to further his research mapping uncharted kelp forests in the Canadian Arctic. -

Mark Patterson Receives Fulbright U.S. Scholar Award to Canada
Mark Patterson has received a Fulbright U.S. Scholar Program award to Canada as the Research Chair on Advancing Transdisciplinary Research on the Changing North at the Université Laval, Québec. -

Understanding Plastic in Our Oceans: Using Technology to Collect and Quantify Microplastics in Marine Environments
Northeastern Alumnus, Ethan Edson, and Professor Mark Patterson continue their longstanding collaboration to advance our understanding of microplastics in marine environments. While Edson’s company, Ocean Diagnostics, develops cutting edge technology and services to enable both scientists and citizens to collect and analyze microplastics pollution data more efficiently and accurately, Patterson and his team have been tasked to beta test these new tools. This partnership is working towards gathering baseline measurements and gaining a better understanding of how microplastics affect fish populations, in hopes of contributing to solutions to the global plastic pollution problem. -
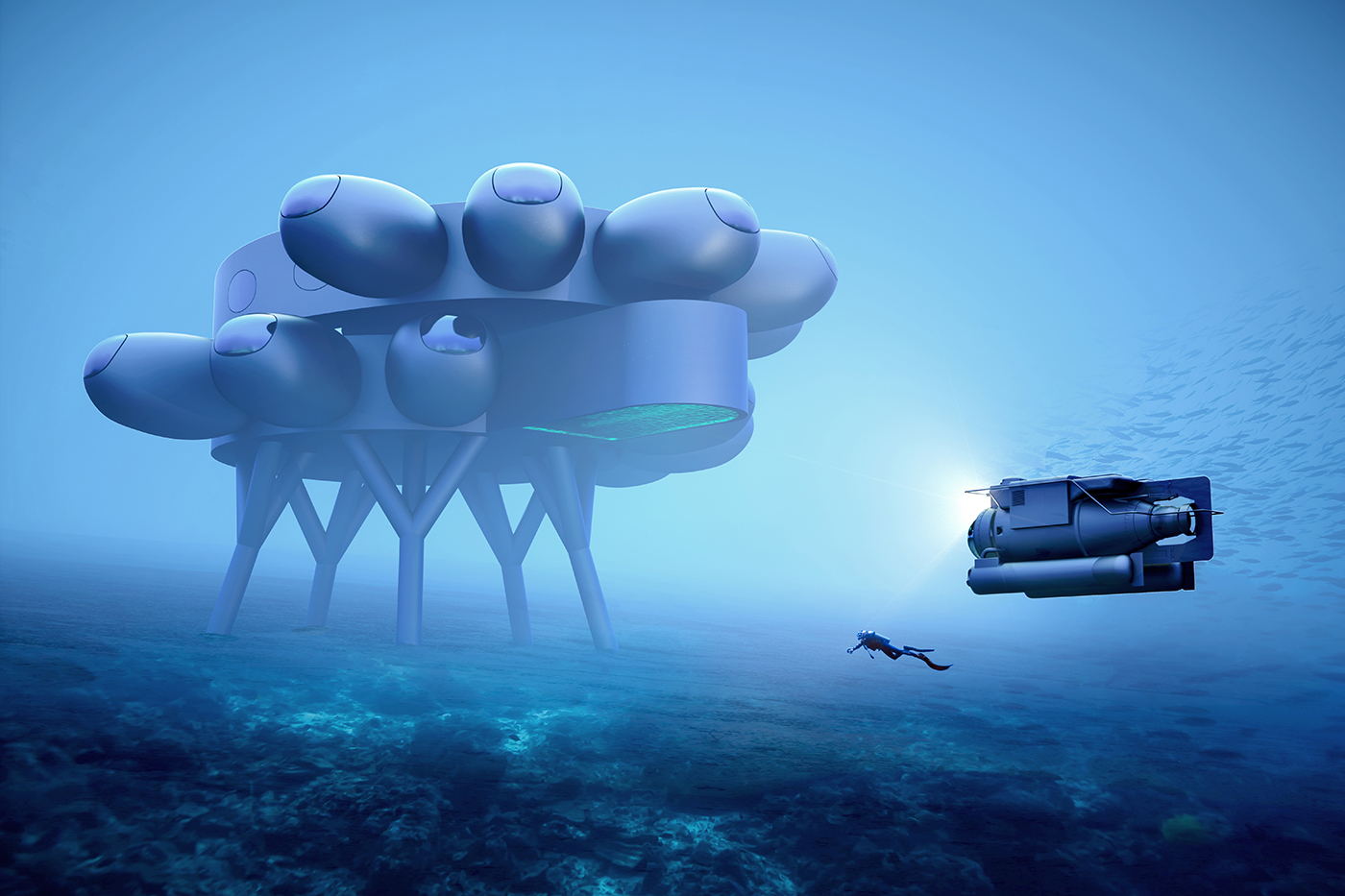
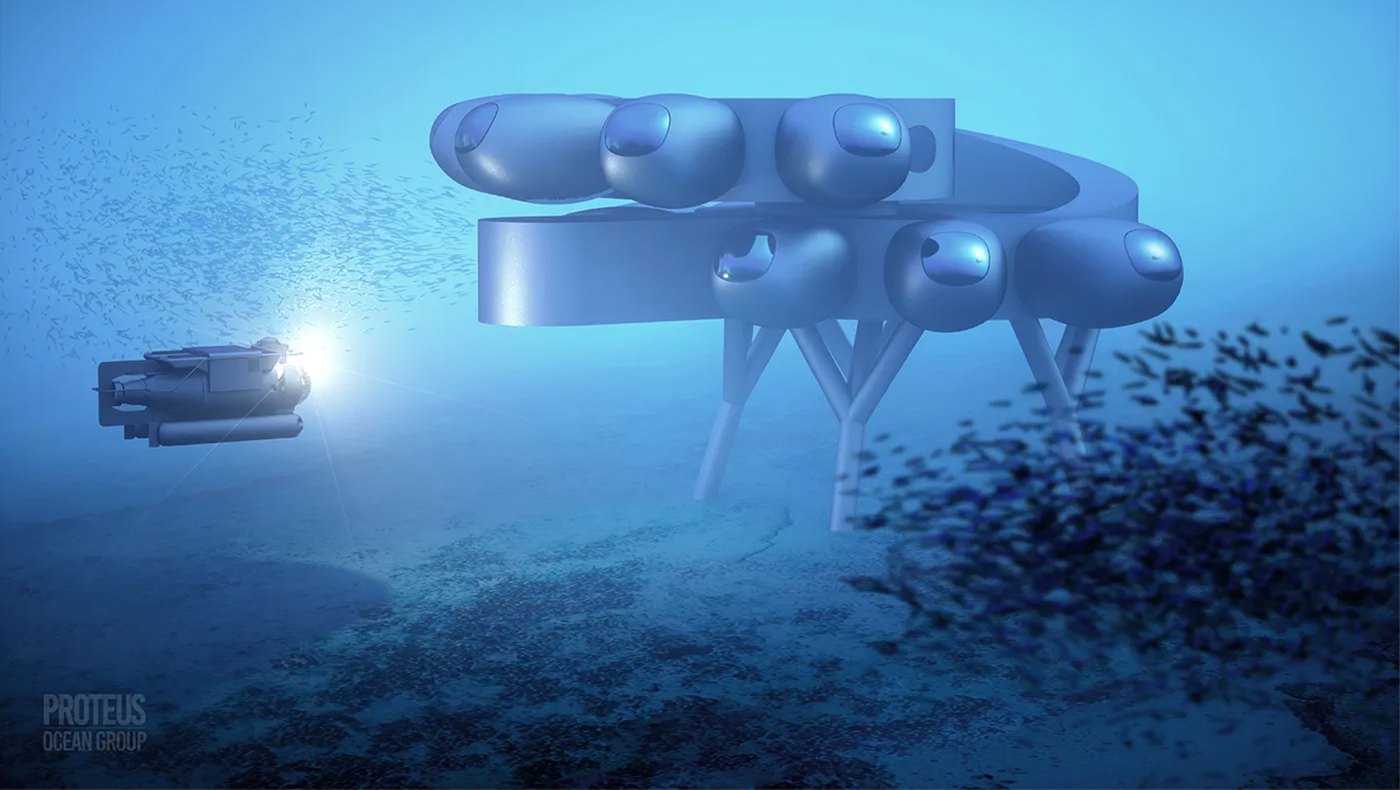
They’re Planning to Build a New Space Station… at the Bottom of the Ocean
The underwater research station will allow scientists and engineers to live, work, and conduct long-term experiments under the sea. Rendering by Yves Béhar, courtesy of Fabien Cousteau Ocean Learning Center. -
‘We Find Ourselves Asking Scientists to Do More than Simply Study the Virus’
We find ourselves asking scientists to do more than simply study the virus,” said Mark Patterson, associate dean for research and graduate affairs in Northeastern’s College of Science, in a conversation streamed on Facebook Live. “In state houses, in cable news interviews, and on social media, they’re translating their data into insights, recommendations, and even advocacy.” Patterson spoke...